前言
根据b站up主踌躇月光学习
虽然是x86汇编语言,但是仍然需要一些基本的汇编基础,建议(必须)先过一遍王爽老师的汇编语言,再进行这部分的学习,这是部分是写os的前置需求
配置开发环境
wsl图形界面
由于调试需要使用bochs,这是一个图形界面的工具,使用命令行是会报错的,因此需要使用Gui,如果是虚拟机,或者是双系统可以直接跳过。
首先安装wsl,以及ubuntu20,直接根据官方文档安装即可。官译版正经安装WSL,非常适合小白(亲测有效) - 知乎 (zhihu.com)
两种方式,一种是安装ubuntu-desktop桌面,另一种是安装xfce4桌面。这里采用第二种。
首先Windows安装xfce4软件
启动!软件
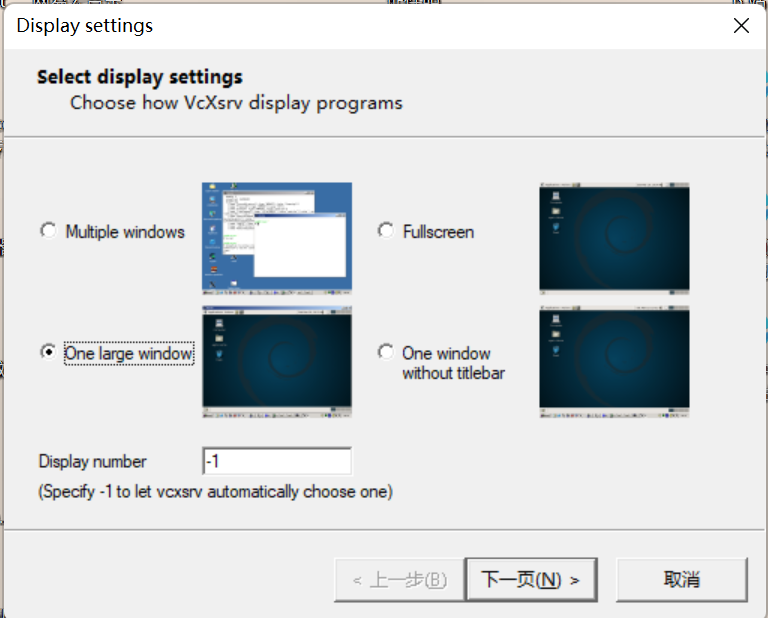
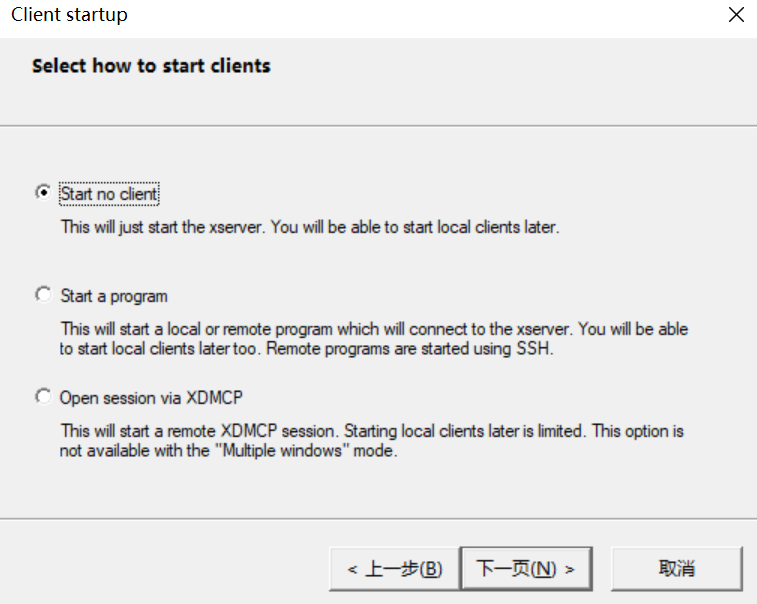
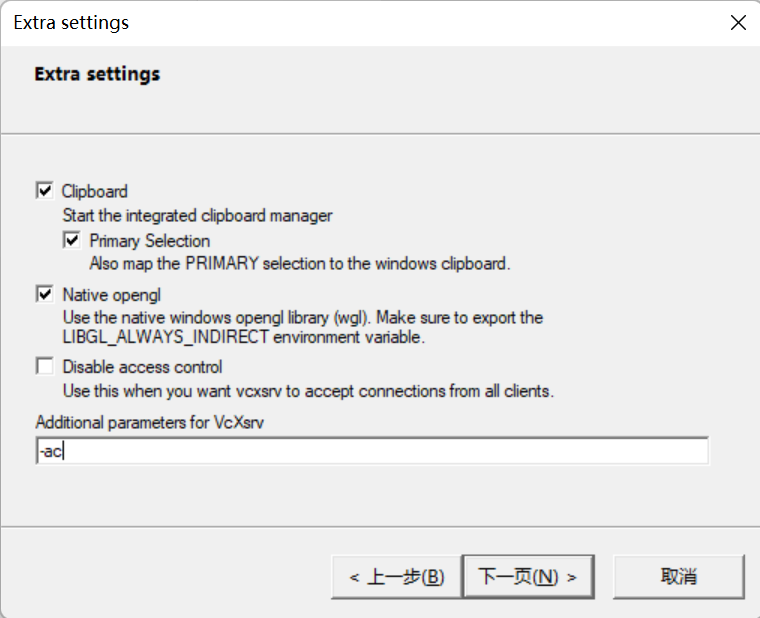
此时点击完成,就会弹出一个黑窗口,先不用管,打开ubuntu
安装xfce
sudo apt update
sudo apt install xfce4-terminal
sudo apt install xfce4修改环境变量,在最后一行添加
cd ~
vi bashrc
export DISPLAY=IP:0这里的IP,填写你自己的,在/etc/resolv.conf下查看

添加好后,不要忘记刷新环境变量
source .bashrc在命令行启动
startxfce4
vscode配置
wsl在vsocde中不用配置,安装扩展
打开vscode,在远程连接的地方就可以看到ubuntu了
查看bin文件插件
汇编语言插件
makefile插件
配置bochs
使用Ubuntu22系统配置bochs,这里如果直接sudo apt install bochs-x配置的,是不能正确运行的,错误如下:
别的版本的Ubuntu应该是可以直接使用apt install安装的,22需要自己手动编译。
下载2.6.11版本的,如果使用2.7版本,大概率在make阶段会遇到SDL.h not found。但是使用2.6.11版本在编译的时候也会错误。所以我转用20版本
在Ubuntu20下完整配置
#安装
sudo apt update
sudo apt install bochs
sudo apt install bochs-x进入工作空间
bochs
#step 1: 选4 save option to...
#step 2: bochs
#step 3: 选7 Quit now此时在目录下面生成一个bocsrc的文件
创建一个磁盘
sudo bximage
#依次输入 1 hd flat 512 16 master.img
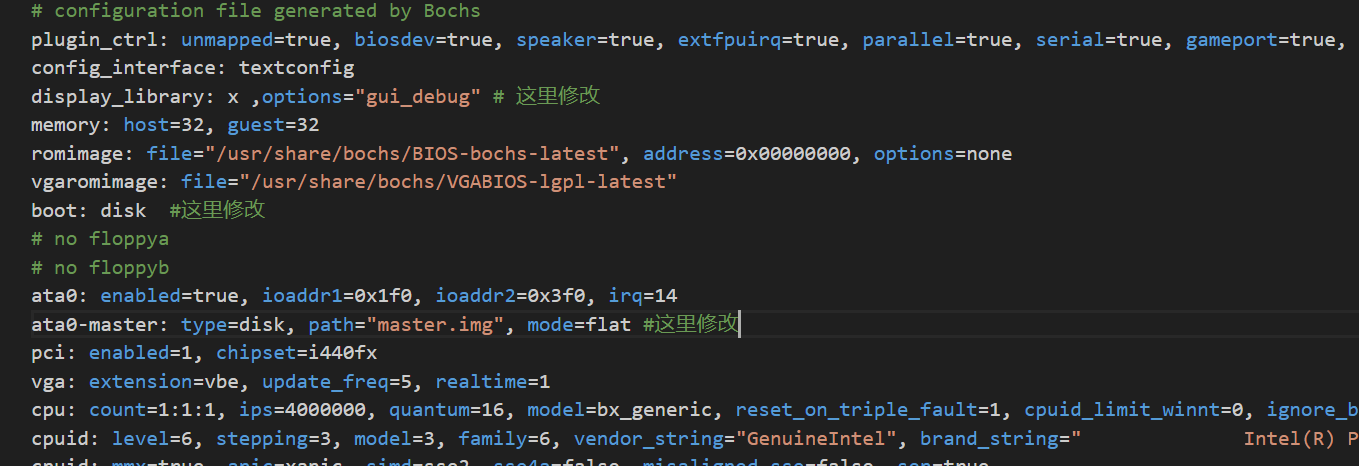
修改bochsrc文件
添加测试代码:
安装 nasm 汇编器sudo apt install nasm
vi hello.asm
mov ax, 0xb800
mov ds, ax; 将代码段设置为 0xb800
mov byte [0], 'H'; 修改屏幕第一个字符为 T
; 下面阻塞停下来
halt:
jmp halt
times 510 - ($ - $$) db 0 ; 用 0 填充满 510 个字节
db 0x55, 0xaa; 主引导扇区最后两个字节必须是 0x55aa然后汇编成二进制代码:
nasm -f bin hello.asm -o hello.bin然后将主引导扇区写入硬盘:
dd if=hello.bin of=master.img bs=512 count=1 conv=notrunc启动 bochs 测试环境:
bochs -q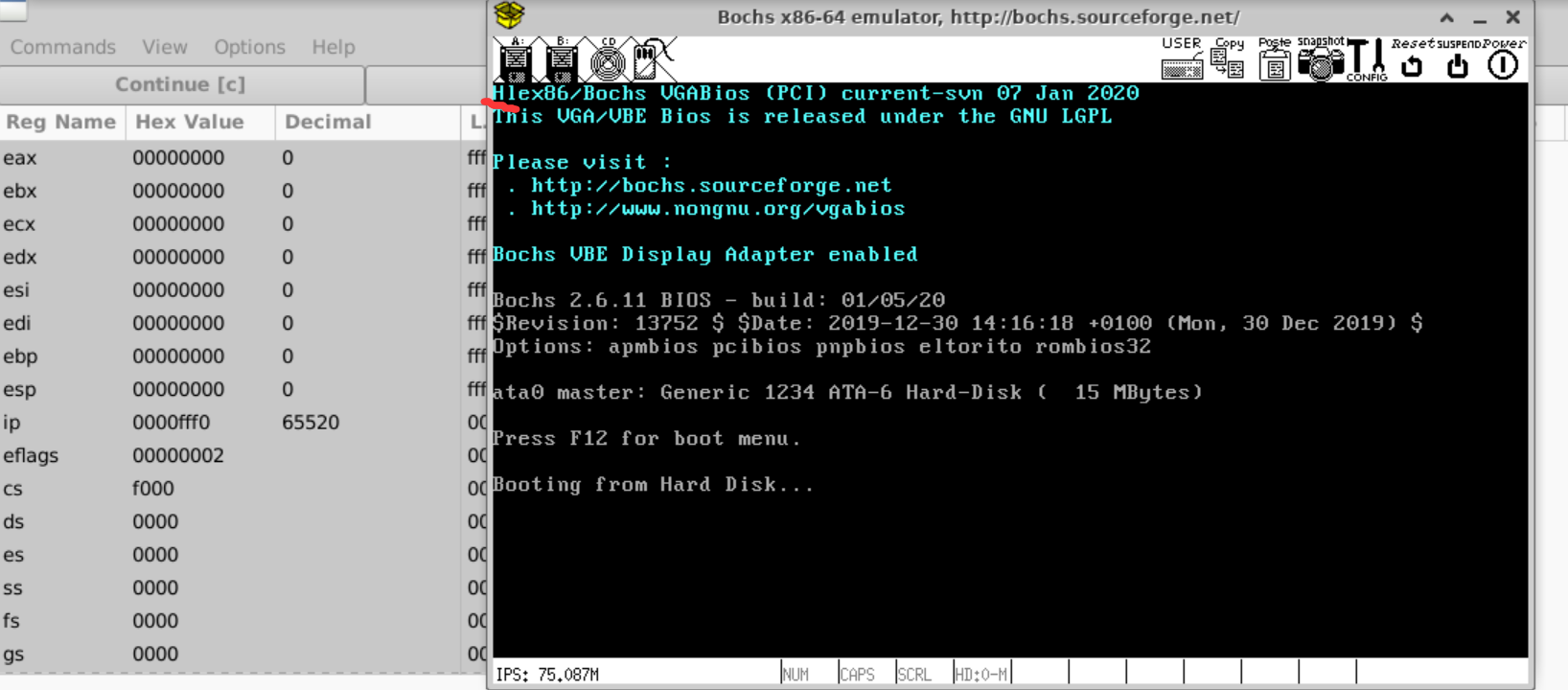
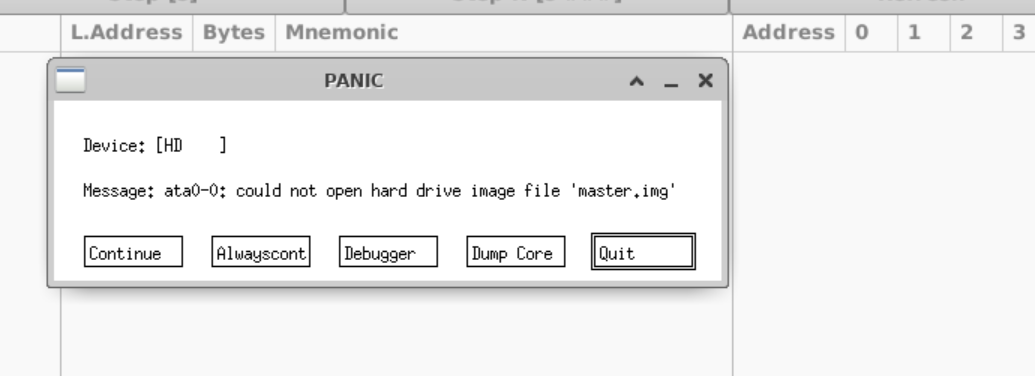
解决方法:
删除目录下的master.img.lock
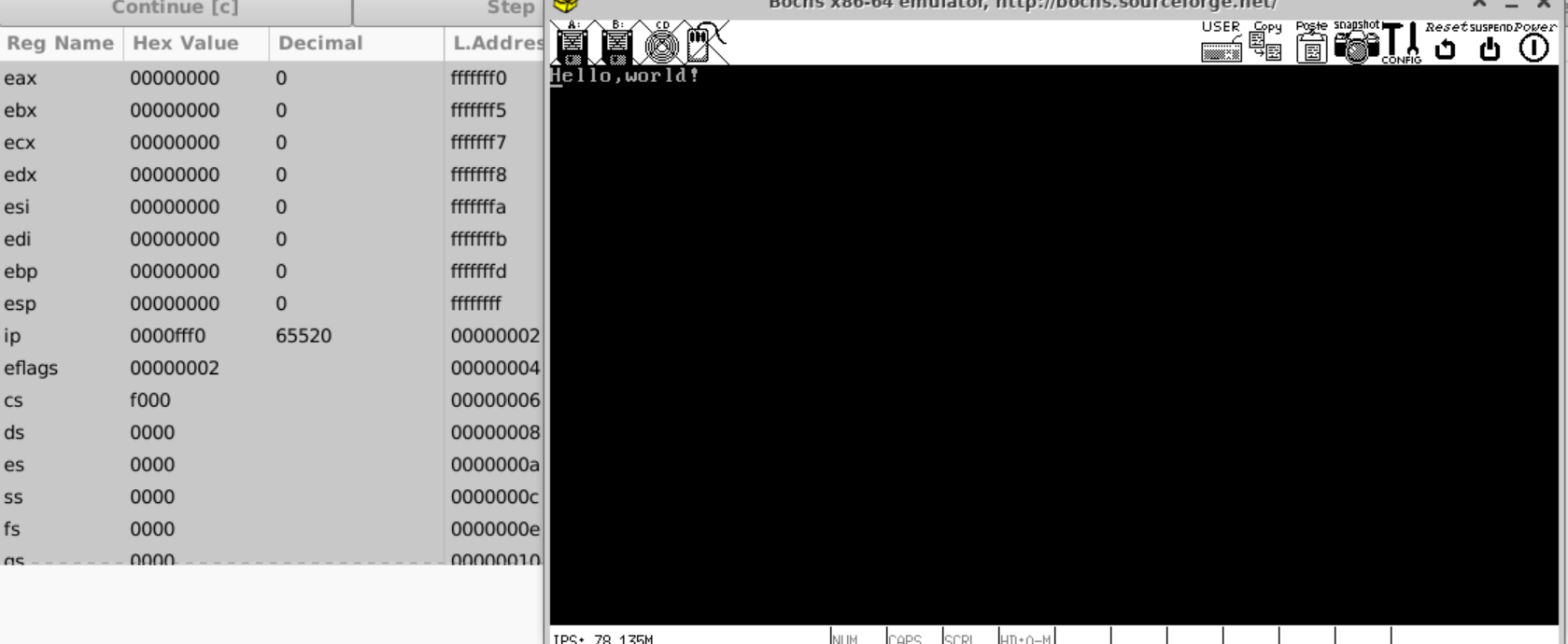
hello world
代码解释
;将显示模式设置为文本
mov ax,3
int 0x10
mov ax, 0xb800
mov ds, ax; 将代码段设置为 0xb800
mov byte [0], 'H';
mov byte [2], 'e';
mov byte [4], 'l';
mov byte [6], 'l';
mov byte [8], 'o';
mov byte [10], ',';
mov byte [12], 'w';
mov byte [14], 'o';
mov byte [16], 'r';
mov byte [18], 'l';
mov byte [20], 'd';
mov byte [22], '!';
; 下面阻塞停下来
halt:
jmp halt ;进入死循环
times 510 - ($ - $$) db 0 ; 用 0 填充满 510 个字节
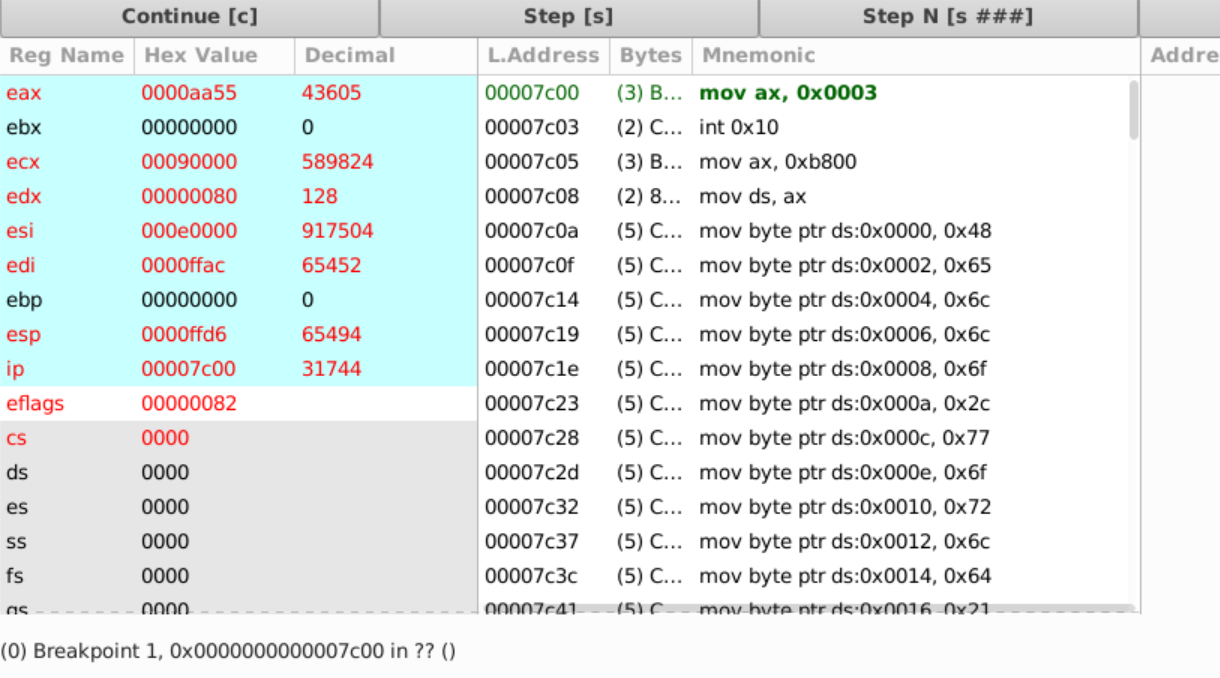
db 0x55, 0xaa; 主引导扇区最后两个字节必须是 0x55aa运行结果:
mov ax,3
int 0x10int 0x10 是一个中断调用,用于在 x86 架构的计算机上调用 BIOS 中断例程。这个特定的中断,0x10,是视频服务的中断向量。
在这个上下文中,mov ax,3 和 int 0x10 一起使用,用于设置显示模式。ax 寄存器的值 3 表示文本模式 80x25 单色/颜色。所以,这两行代码的作用是将显示模式设置为文本模式
mov ax, 0xb800
mov ds, ax; 将代码段设置为 0xb800首先将代码段设置为0xb800,不过8086的实际物理地址是段寄存器*16 + 地址
也就是 0xb800 * 0x10 + 0 = 物理地址 0xb8000。
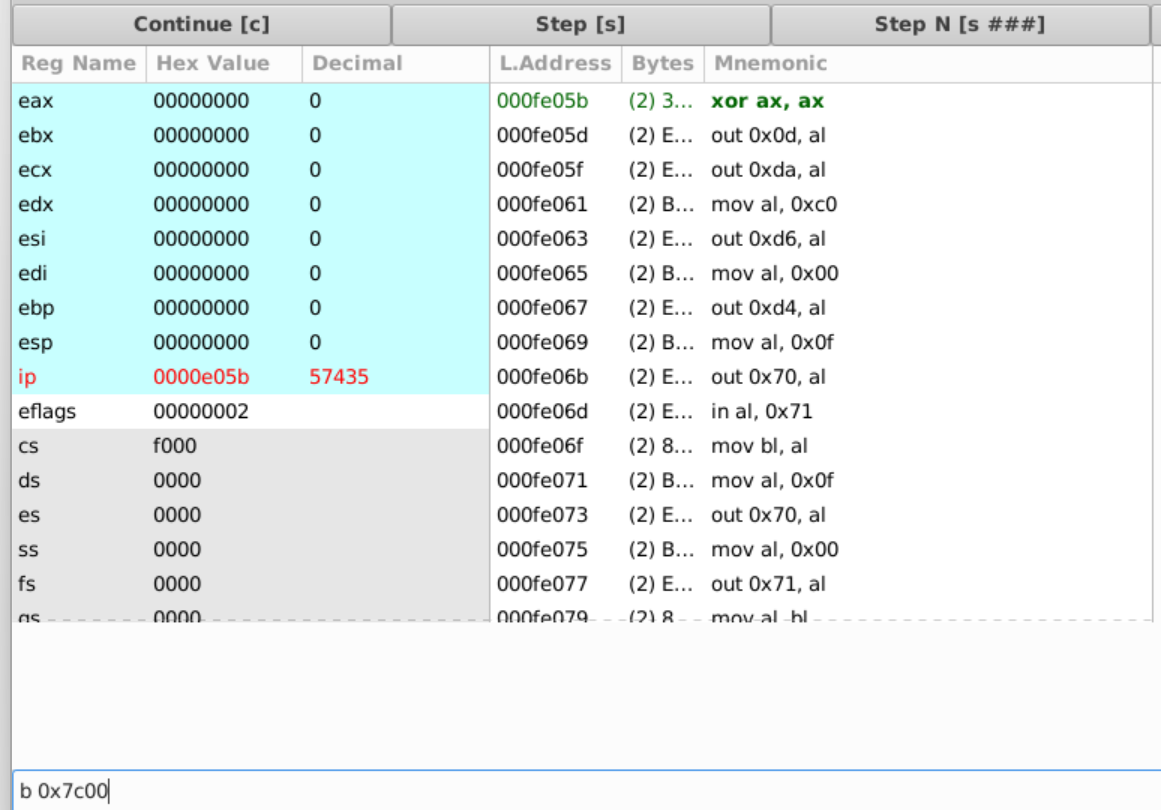
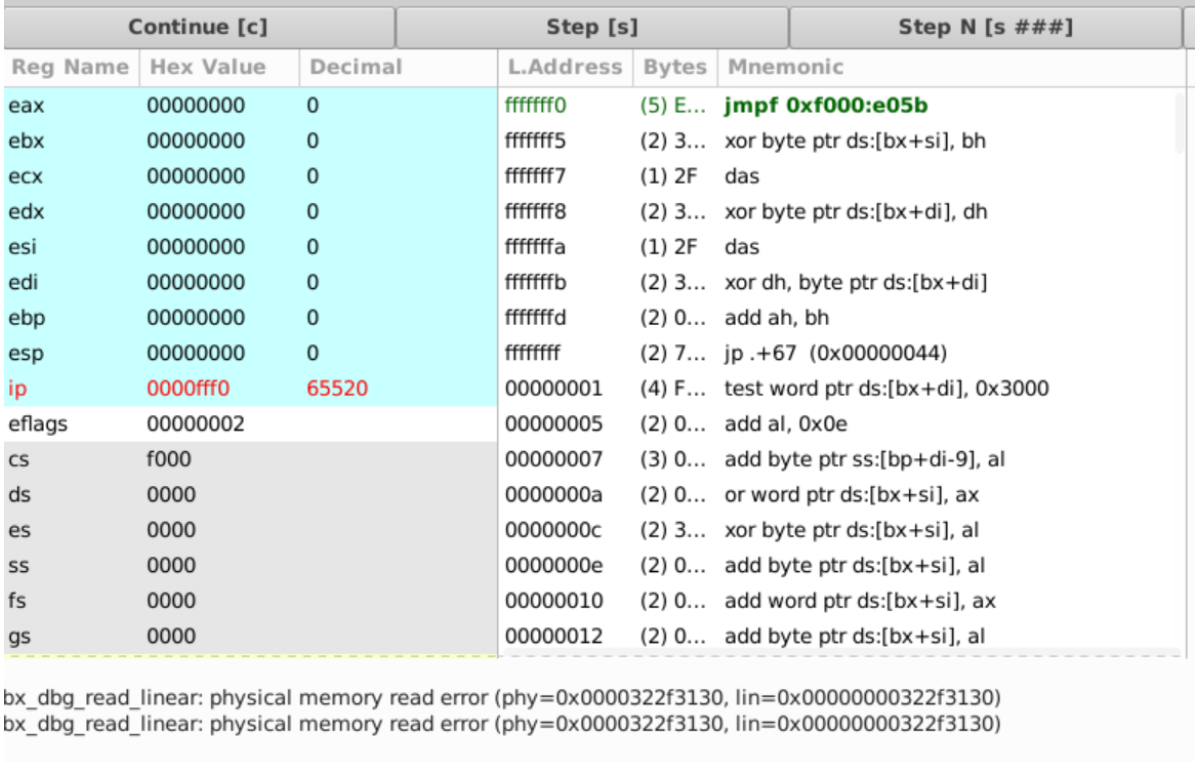
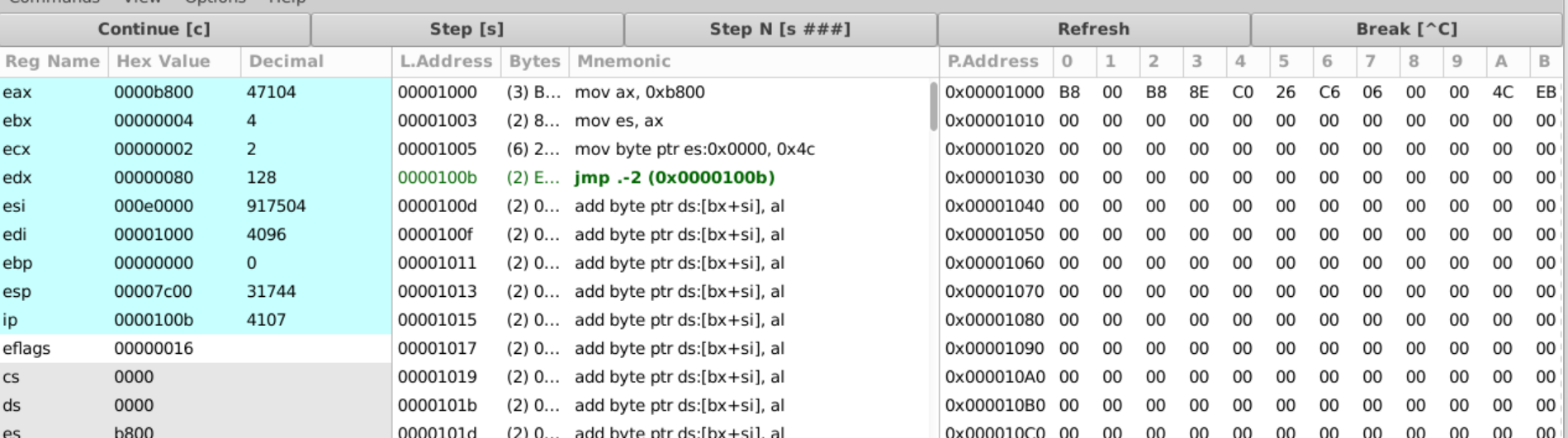
然后点c
这里就可以查看寄存器的情况,点击view,再点击第一个,输入0x7c00,就可以查看当前的内存
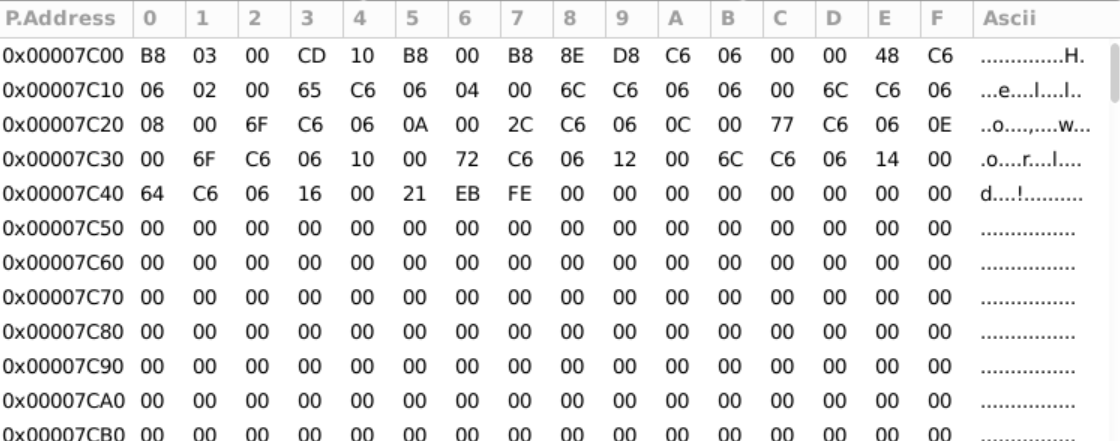
在这片区域中往后翻会找到一块内存中是0x55aa,因为主引导扇区的最后两个字节必须是0x55aa
mov byte [0], 'H';
mov byte [2], 'e';
mov byte [4], 'l';
mov byte [6], 'l';
mov byte [8], 'o';
mov byte [10], ',';
mov byte [12], 'w';
mov byte [14], 'o';
mov byte [16], 'r';
mov byte [18], 'l';
mov byte [20], 'd';
mov byte [22], '!';在文本模式下,屏幕被视为一个二维字符数组,每个字符占用2个字节的空间。第一个字节用于表示字符本身,第二个字节用于表示字符的属性,如颜色和亮度等。
因此,当在屏幕上写入字符时,需要跳过属性字节,只修改字符字节。
例如,mov byte [0], 'H' 将字符 ‘H’ 写入屏幕的第一个位置,mov byte [2], 'e' 将字符 ‘e’ 写入屏幕的第二个位置,依此类推。每个字符的地址都是前一个地址加2,因为每个字符占用2个字节的空间。
times 510 - ($ - $$) db 0 ; 用 0 填充满 510 个字节
db 0x55, 0xaa; 主引导扇区最后两个字节必须是 0x55aa是什么主引导扇区
主引导扇区(Master Boot Record,MBR)是硬盘的第一个扇区。它包含了一个小的启动程序(引导加载器)和分区表。当计算机启动时,BIOS会加载并执行主引导扇区的内容,从而开始启动操作系统。主引导扇区的大小是512个字节。其中,最后两个字节必须是0x55AA,这是一个标准的引导扇区签名,用于标识这个扇区是一个有效的主引导扇区。
db 0x55, 0xaa就是在设置这个签名,而times 510 - ($ - $$) db 0则是在填充剩余的空间,直到达到510个字节,以确保主引导扇区的总大小为512个字节。
$表示当前地址,$$表示当前段的开始地址。times是一个汇编指令,它的作用是重复执行后面的指令指定的次数。
times 510 - ($ - $$) db 0的含义就是:计算当前地址$与当前段的开始地址$$之间的差值,然后从510中减去这个差值,得到的结果就是需要填充的字节数。db 0表示填充的字节值为0。
所以当我们查看0x7c00的时候中间的代码都是0,由于主引导扇区的大小是512,所以减去末尾的55aa,就剩下510个字节需要填充
0x7c00
这个地址在上面反复出现,那么这个代表什么意思。
0x7c00就是MAR加载区域,加载到内存中的默认地址。当计算机启动并执行 POST(Power-On Self Test)后,BIOS 会从启动设备(如硬盘)的第一个扇区(即主引导扇区)读取 512 个字节的数据,并将这些数据加载到物理内存地址 0x7C00 处,然后跳转到这个地址开始执行。
也就是这个区域就是你的代码所在的地址
还有别的一些默认地址
| 起始地址 | 结束地址 | 大小 | 用途 |
|---|---|---|---|
| 0x000 | 0x3ff | 1kb | 中断向量表 |
| 0x400 | 0x4ff | 256b | BIOS数据区 |
| 0x500 | 0x7bff | 29.75kb | 可用区域 |
| 0x7c00 | 0x7dff | 512b | MBR 加载区域 |
| 0x7e00 | 0x9fbff | 607.6kb | 可用区域 |
| 0x9fc00 | 0x9ffff | 1kb | 扩展BIOS数据区 |
| 0xa0000 | 0xaffff | 64kb | 彩色显示适配器 |
| 0xb0000 | 0xb7fff | 32kb | 黑白显示适配器 |
| 0xb8000 | 0xbffff | 32kb | 文本显示适配器 |
| 0xc0000 | 0xc7fff | 32kb | 显示适配器 BIOS |
| 0xc8000 | 0xeffff | 160kb | 映射内存 |
| 0xf0000 | 0xfffef | 64kb-16b | 系统BIOS |
| 0xffff0 | 0xfffff | 16b | 系统BIOS入口地址 |
基础
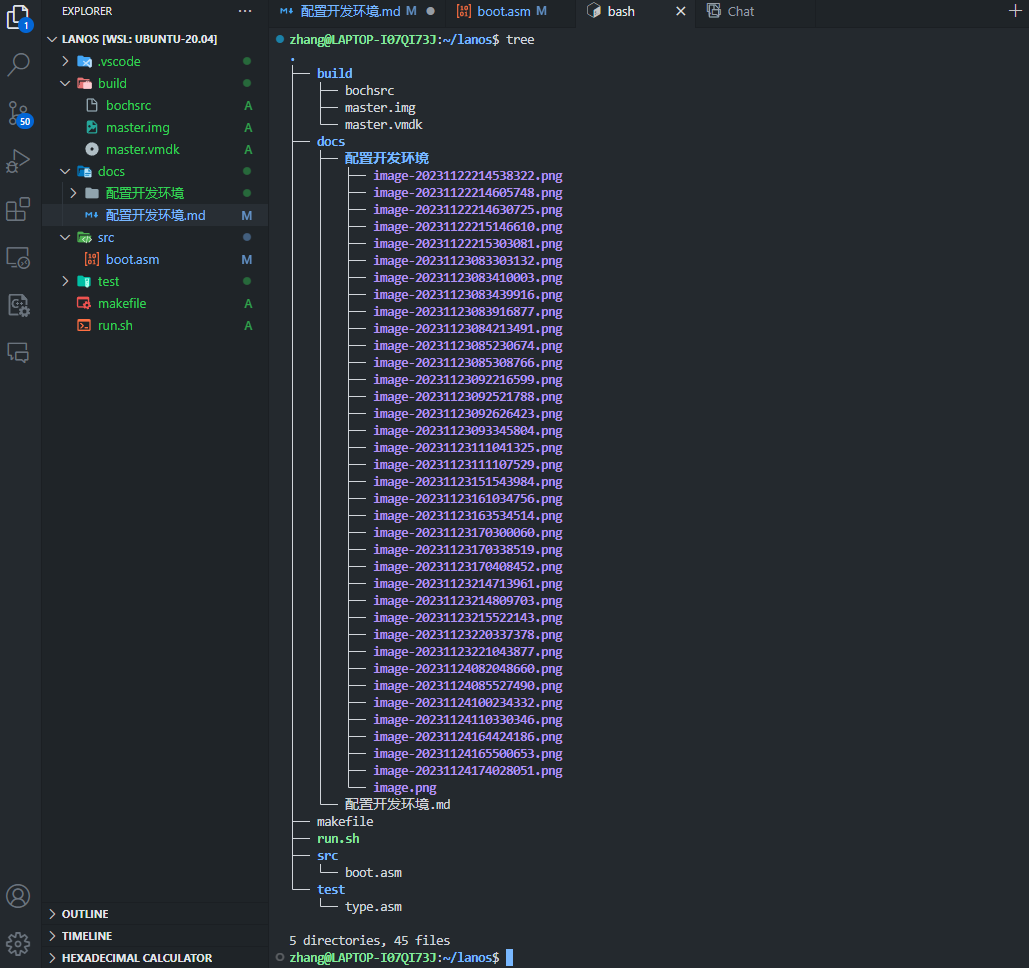
首先将上面所有的命令都编写到一个makefile文件中。
# 编译boot.asm
boot.bin: boot.asm
nasm boot.asm -o boot.bin
# 写入到虚拟硬盘
master.img: boot.bin
dd if=boot.bin of=master.img bs=512 count=1 conv=notrunc
#删除生成的文件,和img.lock文件,不清楚这个文件为什么会出现,但是一出现这个,bochs就会报错,所以要删掉
.PHONY: clean # 伪目标,不生成文件,只是执行命令,不管有没有clean文件,都执行命令
clean:
rm -f *.bin *.img.lock
# 运行bochs
.PHONY: bochs
bochs:
bochs -q然后再编写一个shell,添加内容
make clean
make boot.bin
make master.img
make bochs这样不需要繁琐的运行了,直接运行这个shell脚本就可以了
8086的寄存器
通用寄存器
| 寄存器 | 描述 |
|---|---|
| AX | 累加结果数据 |
| BX | 数据段数据指针 |
| CX | 字符串和循环计数器 |
| DX | I/O 指针 |
| DI | 目的数据指针 |
| SI | 源数据指针 |
| SP | 栈指针 |
| BP | 栈数据指针 |
前四位可以分成高八位和第八位
| 寄存器 | 高八位 | 低八位 |
|---|---|---|
| AX | AH | AL |
| BX | BH | BL |
| CX | CH | CL |
| DX | DH | DL |
段寄存器
| 段寄存器 | 描述 |
|---|---|
| CS | 代码段寄存器 |
| DS | 数据段寄存器 |
| SS | 栈段寄存器 |
| ES | 额外的寄存器 |
IP和FLAG/PSW
标志寄存器
| 位 | 标志 | 英文 | 描述 |
|---|---|---|---|
| 0 | CF | Carry | 进位标志 |
| 1 | |||
| 2 | PF | Parity | 奇偶标志 |
| 3 | |||
| 4 | AF | Auxiliary | 辅助进位标志 |
| 5 | |||
| 6 | ZF | Zero | 零标志 |
| 7 | SF | Sign | 符号标志 |
| 8 | TF | Trap | 陷阱标志 |
| 9 | IF | Interrupt | 中断允许标志 |
| 10 | DF | Direction | 方向标志 |
| 11 | OF | Overflow | 溢出标志 |
示例:
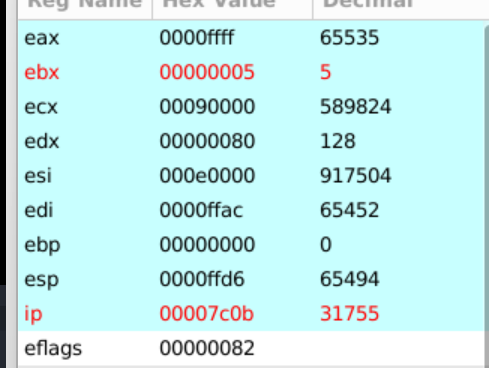
加之前
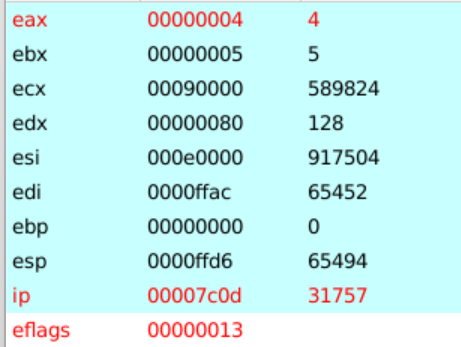
加之后
82: 1000_0010
13: 0001_0011
这里的第零位从0变为了1
数据类型
- db 字节
- dw 字
- dd 双字
一个字是两个字节
新建一个type.asm,编译
touch type.asm
make tpye.bin看一下两个数据类型,添加两行代码
编译成功后查看二进制文件

我们本来存的是aa55,但是在内存中显示是55 aa,在8086的设计中使用的都是小端存储。这种设计延续至今,英特尔的CPU都是小端存储
使用数据类型,hello,world:
org 0x7c00 ;代码的起始位置
mov ax,3
int 0x10;清空屏幕
mov ax,0xb800
mov es,ax ;将es赋值0xb800
mov ax,0
mov ds,ax ;ds赋值0
mov si,message ;把message的地址赋给si寄存器
mov di,0;把0赋给di寄存器,di也是一个索引寄存器,它可以用来指定一个字符串的目的地址,这里就是把di寄存器的值设置为0,也就是显存的起始地址。
mov cx,(message_end-message);把(message_end-message)的值赋给cx寄存器,cx是一个计数寄存器
loop1:
mov al,[ds:si] ;[ds:si]的值赋给al寄存器,al是一个8位的寄存器,它可以用来存储一个字符,[ds:si]是一个内存地址,它表示从ds寄存器的值开始,加上si寄存器的值的偏移量,得到的内存地址,这里就是把[ds:si]的值赋给al寄存器,也就是把消息的第一个字符赋给al寄存器。
mov [es:di],al;这一行是用来把al寄存器的值赋给[es:di],[es:di]也是一个内存地址,它表示从es寄存器的值开始,加上di寄存器的值的偏移量,得到的内存地址,这里就是把al寄存器的值赋给[es:di],也就是把消息的第一个字符写入显存的第一个位置。
inc si;si取出下一个字符
add di,2;字符显示偶数,所以继续+2
loop loop1
halt:
jmp halt
message:
db "hello,world!!",0;0,表示字符串的结束。
message_end:
times 510 -($-$$) db 0
db 0x55,0xaa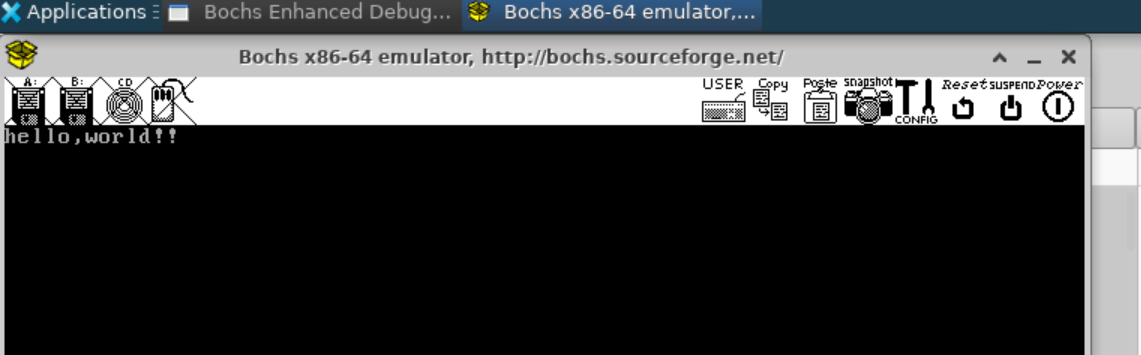
这里可以跳转到0x7c00单步调试查看运行的结果
寻址方式
物理地址
物理地址 = 段地址*16 + 偏移地址,为什么不能直接使用物理地址?
8086是16位的cpu,也就是2的十六次方,可以访问64kb
但是8086最多可以访问1M的内存,也就是2的20次方
如何使用16位访问20位的地址,比一个形象的例子

此时从家到图书馆的物理地址是2326,也可以表示为2000+326
相对的如果你只有一个3个格子表示数字,但是表示2326需要四个格子,那么是不是可以使用200*10+326来表示物理地址。
在cpu中偏移地址就相当于326,段地址就是2000,那么表示物理地址就是那个公式,为什么*16?
这就可以看作是段地址 << 4,那么这样就是20位的地址再加上偏移地址就是实际的地址
3.汇编指令:【寻址方式】立即数寻址、寄存器寻址、存储器寻址
算数运算指令
加减法
org 0x7c00
mov ax,3
int 0x10
add word [number],5 ;加法运算
mov ax,5
mov bx,6
sub bx,ax; bx - ax 减法运算
halt:
jmp halt
number:
dw 0x3456
times 510 -($-$$) db 0
db 0x55,0xaa乘法
乘法由于一个寄存器可能存不下,因此如果一个寄存器存不下的就会存入dx之中
org 0x7c00
mov ax,3
int 0x10
mov ax,6
mov bx,5
mul bx;dx:ax = ax * bx,这里是mul后面接的乘数,而不是ax
halt:
jmp halt
times 510 -($-$$) db 0
db 0x55,0xaa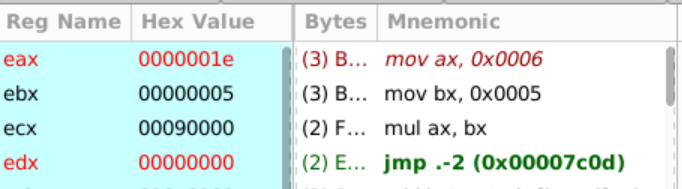
除法
就是ax除以操作数 = 商存在ax,余数存在dx
org 0x7c00
mov ax,3
int 0x10
mov ax,6
mov bx,5
mul bx;dx:ax = ax * bx,这里是mul后面接的乘数,而不是ax
mov bx,4
div bx; ax: 7 bx: 2 | 30/4=7...2
halt:
jmp halt
times 510 -($-$$) db 0
db 0x55,0xaa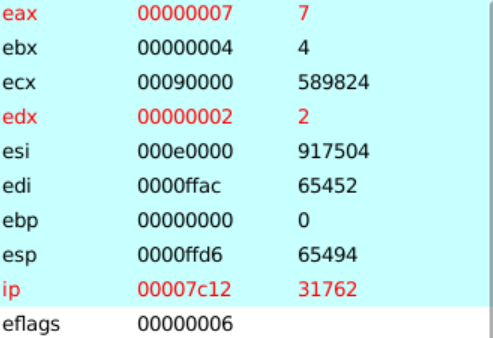
逻辑运算指令
- and 与 —-> 还有一个test 这两个的关系和sub cmp一样,只做运算不更新数据更新标志位
- or 或
- not 非
- xor 异或
- SHL/SHR 移位
- ROL/ROR 循环移位
- RCL/RCR 带进位的循环移位
转移指令
8086 cs:ip 下一条指令的地址,物理地址 = cs << 4 + ip
org 0x7c00
mov ax,3
int 0x10
mov ax,0
mov cx,100
start:
add ax,cx
sub cx,1
jz end ; 如果cx == 0 就跳转到end
jmp start
end:
halt:
jmp halt
times 510 -($-$$) db 0
db 0x55,0xaa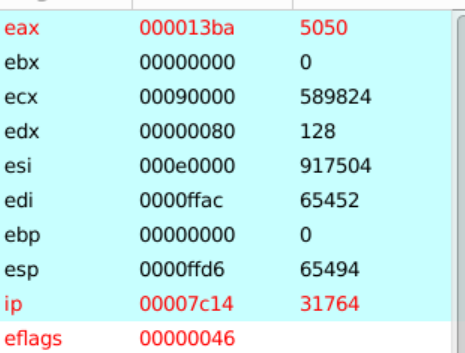
这是使用jmp实现的累加,但是如果是使用loop
start:
add ax,cx
loop start这样就不需要自己动手cx-1,也不需要判断cx为0
堆栈和函数
栈顶指针:ss:sp
org 0x7c00
mov ax,3
int 0x10
mov ax,0
mov ss,ax
mov sp,0x7c00
push byte 4
push dword 7
push word 5
pop ax
pop bx
pop cx
pop dx
halt:
jmp halt
times 510 -($-$$) db 0
db 0x55,0xaa进栈的顺序是4,0,7,5 ——> 这个0是dword的,双字。
因此得到的ax = 5 | bx = 7 | cx = 0 | dx = 4

这个过程中栈指针的变化:
7c00 –> 7bfe – >7bfa –> 7bf8 –> 7bfa –>7bfc –>7bfe –> 7bc00
可以看到在入栈的过程在,栈指针是减少的,在8086中栈的从高位到地位的,当push dword的时候,栈指针是-4的,word和byte是-2的。
函数
函数调用的时候就会创建一个栈帧,这是C语言里面学过的,在汇编中可以明显的看到这一个过程
org 0x7c00
mov ax,3
int 0x10
mov cx,25
loop1:
call print
loop loop1
halt:
jmp halt
video:
dw 0x0
print:
push ax
push es
push bx
mov ax,0xb800
mov es,ax
mov bx,[video]
mov byte [es:bx],'|'
add word [video],2
pop bx
pop es
pop ax
ret
times 510 -($-$$) db 0
db 0x55,0xaa
在调用print函数的时候,会先将loop loop1这条指令的地址入栈,然后再跳转到print处,因此call print这条命令的作用其实等价于
push ip ;汇编中是没有这个ip的,不过意思是这个意思
jmp print同时在print中使用了三个寄存器,ax,bx,es,为了不影响其他函数的正常运行就需要先入栈寄存器的状态,然后在函数结束之前,再还原寄存器,这也就是函数的栈帧
输入输出
org 0x7c00
mov ax,3
int 0x10
mov ax,0xb800
mov es,ax
mov si,message
mov di,0
mov cx,message_end-message
print:
mov bl,[si]
mov [es:di],bl
inc si
add di,2
loop print
halt:
;hlt ;关闭CPU,等待外中断的到来
jmp halt
message:
db "hello world",0
message_end:
times 510 -($-$$) db 0
db 0x55,0xaa这段hello world的代码还有一些问题,就是窗口闪动的光标一直在第一个位置,并没有移动到后面
为了读取这个光标的位置,就需要输入输出指令来控制硬件(外围设备)
- 显示器
- 键盘
- 鼠标
两种方式:端口 映射内存
英特尔的端口是在0 - 65535
CRT(地址端口):0x3D4 CRT(数据端口):0x3D5
这里主要就涉及了in 和 out两个指令,不过学过8255A的话应该也比较好理解
org 0x7c00
CRT_ADDR_REG equ 0x3D4
CRT_DATA_REG equ 0x3D5
CRT_CURSOR_H equ 0x0E ;光标的高八位
CRT_CURSOR_L equ 0x0F ;光标的低八位
mov ax,3
int 0x10
mov ax,0
mov ds,ax
mov ss,ax
mov sp,0x7c00
mov ax,0xb800
mov es,ax
mov si, message
print:
call get_cursor
mov di,ax
shl di,1
mov bl,[si]
cmp bl,0
jz print_end
mov [es:di],bl
inc si
inc ax
call set_cursor
jmp print
print_end:
halt:
hlt
jmp halt
get_cursor:
push dx
mov dx,CRT_ADDR_REG
mov al,CRT_CURSOR_H
out dx,al
mov dx,CRT_DATA_REG
in al,dx
shl ax,8
mov dx,CRT_ADDR_REG
mov al,CRT_CURSOR_L
out dx,al
mov dx,CRT_DATA_REG
in al,dx
pop dx
ret
set_cursor:
push dx
push bx
mov bx,ax
mov dx,CRT_ADDR_REG
mov al,CRT_CURSOR_L
out dx,al
mov dx,CRT_DATA_REG
mov al,bl
out dx,al
mov dx,CRT_ADDR_REG
mov al,CRT_CURSOR_H
out dx,al
mov dx,CRT_DATA_REG
mov al,bh
out dx,al
pop bx
pop dx
ret
message:
db 'Hello, World!',0
times 510 -($-$$) db 0
db 0x55,0xaa
字符样式
偶数位是控制的文本,奇数位就是文本的字符样式
- 高四位表示背景色 |K|R|G|B|
- 第四位表示前景色 |I |R|G|B|
K = 0 背景不闪烁 =1 闪烁
I = 0 浅色 =1 深色
org 0x7c00
CRT_ADDR_REG equ 0x3D4
CRT_DATA_REG equ 0x3D5
CRT_CURSOR_H equ 0x0E ;光标的高八位
CRT_CURSOR_L equ 0x0F ;光标的低八位
mov ax,3
int 0x10
mov ax,0
mov ds,ax
mov ss,ax
mov sp,0x7c00
mov ax,0xb800
mov es,ax
mov si, message
print:
call get_cursor
mov di,ax
shl di,1
mov bl,[si]
cmp bl,0
jz print_end
mov [es:di],bl
mov byte [es:di+1], 0b0000_0011 ;设置样式
inc si
inc ax
call set_cursor
jmp print
print_end:
halt:
hlt
jmp halt
get_cursor:
push dx
mov dx,CRT_ADDR_REG
mov al,CRT_CURSOR_H
out dx,al
mov dx,CRT_DATA_REG
in al,dx
shl ax,8
mov dx,CRT_ADDR_REG
mov al,CRT_CURSOR_L
out dx,al
mov dx,CRT_DATA_REG
in al,dx
pop dx
ret
set_cursor:
push dx
push bx
mov bx,ax
mov dx,CRT_ADDR_REG
mov al,CRT_CURSOR_L
out dx,al
mov dx,CRT_DATA_REG
mov al,bl
out dx,al
mov dx,CRT_ADDR_REG
mov al,CRT_CURSOR_H
out dx,al
mov dx,CRT_DATA_REG
mov al,bh
out dx,al
pop bx
pop dx
ret
message:
db 'Hello, World!',0
times 510 -($-$$) db 0
db 0x55,0xaa
中断
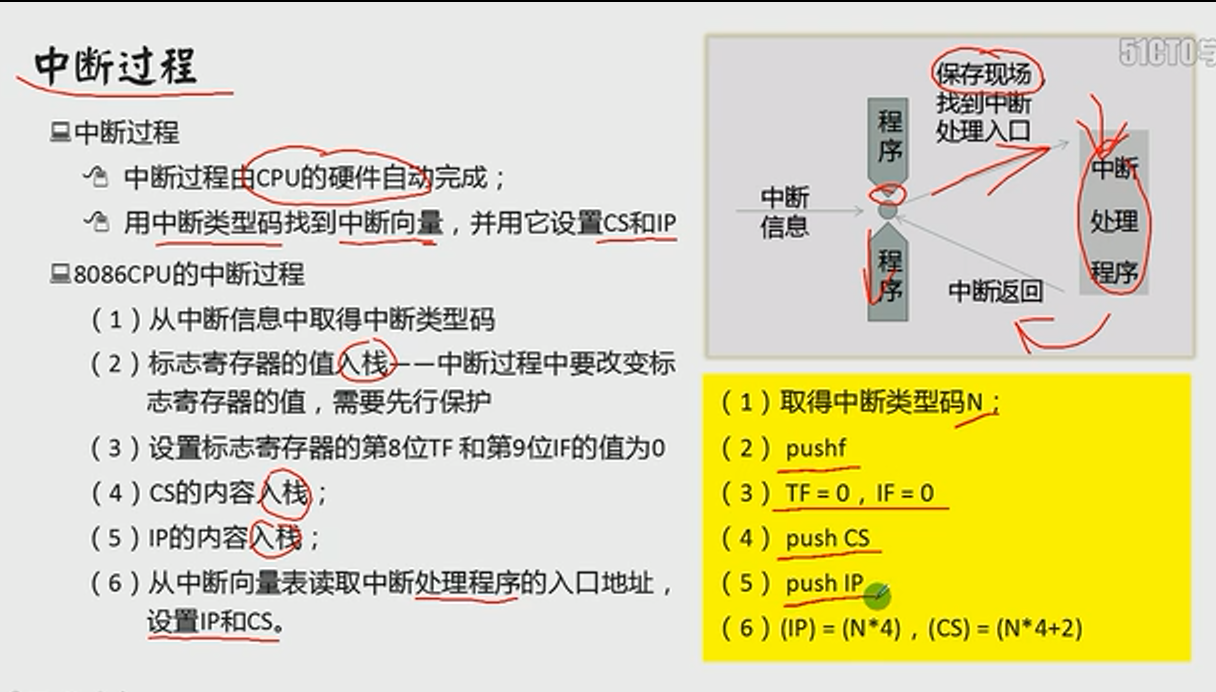
内中断和异常
远调用:如果函数的调用在寄存器之外就需要远调用
普通调用就只需要保存下一条指令的IP就可以了,但是远调用不仅仅需要需要保存,还需要保存寄存器。
call func –> push IP jmp func
call far func –> push cs push ip jmp func
org 0x7c00
mov ax,3
int 0x10
mov cx,25
loop1:
call 0:print ;callf
loop loop1
halt:
jmp halt
video:
dw 0x0
print:
push ax
push es
push bx
mov ax,0xb800
mov es,ax
mov bx,[video]
mov byte [es:bx],'|'
add word [video],2
pop bx
pop es
pop ax
retf ;远调用是需要使用retf
times 510 -($-$$) db 0
db 0x55,0xaa这种是直接跳转还有一种间接跳转的方式
org 0x7c00
mov ax,3
int 0x10
mov ax,0
mov dx,ax
mov cx,25
loop1:
;call 0:print ;callf
call far [func]
loop loop1
halt:
jmp halt
video:
dw 0x0
print:
push ax
push es
push bx
mov ax,0xb800
mov es,ax
mov bx,[video]
mov byte [es:bx],'|'
add word [video],2
pop bx
pop es
pop ax
retf ;远调用是需要使用retf
func:
dw print,0
times 510 -($-$$) db 0
db 0x55,0xaa内中断表的起始位置是0x000,结束位置是0x3ff,也就是0x400
一个中断向量占4个字节,一个是段地址,一个偏移地址,0x400 / 4 = 0x100 也就是一共有256个中断向量
中断号就是0 - 255号
0 号是除法异常,内存就是从0到3
0x80是linux的系统调用,不过8086中是没有Linux的,从386开始才有,不过这里就用与代表软中断
0x80的向量地址就是0x80 * 4 + 3
在使用内中断之前要是注册中断函数
org 0x7c00
mov ax,3
int 0x10
;mov word [0x80 * 4], print
;mov word [0x80 * 4 + 2], 0
mov word [0x0 * 4], div_error ;根据中断号找到入口程序
mov word [0x0 * 4 + 2], 0
mov dx,0
mov ax,0
mov bx,0
div bx
halt:
jmp halt
video:
dw 0x0
print:
push ax
push es
push bx
mov ax,0xb800
mov es,ax
mov bx,[video]
mov byte [es:bx],'|'
add word [video],2
pop bx
pop es
pop ax
;ret
;retf
iret
div_error:
push ax
push es
push bx
mov ax,0xb800
mov es,ax
mov ax,0
mov ds,ax
mov si,message
mov di,0;
mov cx,(message_end-message);
loop1:
mov al,[ds:si];
mov [es:di],al;
inc si;
add di,2;
loop loop1
pop bx
pop es
pop ax
;ret
;retf
iret
message:
db "div is error",0
message_end:
times 510 -($-$$) db 0
db 0x55,0xaa这段代码在运行的时候div的除数的0,这就触发中断函数,从而调用div_error,在屏幕中打印div is error
并且中断调用不仅仅会保存下一个指令的IP,CS,还有保存标志寄存器
这里段代码使用的函数返回是iret,到这里已经使用过3中ret
ret:就只返回IP 普通函数调用
retf:返回IP还有CS 远调用
iret:返回IP,CS以及标志寄存位 中断调用
外中断和时钟
8259 - 可编程中断控制器 / PIC Programmable Interrupt Controller
- 主芯片 - 8 1
- 从芯片 - 8
- 级联方式
中断向量表:
| 向量 | 功能 |
|---|---|
| 0 | 除法溢出 |
| 1 | 单步 (用于调试) |
| 2 | 非屏蔽中断 NMI |
| 3 | 断点 (用于调试) |
| 4 | 溢出中断 |
| 5 | 打印屏幕 |
| 6-7 | 保留 |
| 8 | 时钟 |
| 9 | 键盘 |
| A | 保留 |
| B | 串行通信COM2 |
| C | 串行通信COM1 |
| D | 保留 |
| E | 软盘控制器 |
| F | 并行打印机 |
| 端口 | 说明 | 标记 |
|---|---|---|
| 0x20 | 主 PIC 命令端口 | PIC_M_CMD |
| 0x21 | 主 PIC 数据端口 | PIC_M_DATA |
| 0xA0 | 从 PIC 命令端口 | PIC_S_CMD |
| 0xA1 | 从 PIC 数据端口 | PIC_S_DATA |
- ICW1 ~ ICW4 用于初始化 8259 initialization Command Words
- OCW1 ~ OCW3 用于操作 8259 Operation Commands Words
这里以处理时钟的中断为例
- 向 OCW1 写入屏蔽字,打开时钟中断
- sti 设置 CPU 允许外中断
- 向 OCW2 写入 0x20, 表示中断处理完毕
- IF 是 CPU 的外中断开关
- MASK 中断屏蔽开关 是 8259 总开关
org 0x7c00
PIC_M_CMD equ 0x20
PIC_M_DATA equ 0x21
mov ax,3
int 0x10
mov ax,0
mov ds,ax
mov ss,ax
mov sp,0x7c00
;注册中断函数
mov word [8*4],clock
mov word [8*4+2],0
mov al,0b1111_1110
out PIC_M_DATA,al
sti; IF = 1 set interrupt CPU允许中断
;cli clear interrupt
;clc clear carry
loopa:
mov bx,3
mov al,'A'
call blink
jmp loopa
clock:
push bx
push ax
mov bx,4
mov al,'C'
call blink
mov al,0x20
out PIC_M_CMD,al
pop ax
pop bx
iret
blink:
push es
push bx
mov dx,0xb800
mov es,dx
shl bx,1
mov dl,[es:bx]
cmp dl,' '
jnz .set_space
.set_char:
mov [es:bx],al
jmp .done
.set_space:
mov byte [es:bx], ' '
.done:
shr bx,1
pop bx
pop es
ret
times 510 -($-$$) db 0
db 0x55,0xaa这段代码a和c会在3,4的位置闪烁,在调用clock函数的时候会的会将三个值压入栈中
push ip
push cs
push flags为什么要保存flags,在调用之前flags是0x206,调用之后是0x006
0x206: 0b0010_0000_0110
0x006: 0b0000_0000_0110
第9位由1置为了0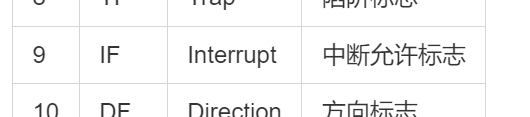
由于是已经调用了中断,因此需要将这个标志位置为0,防止CPU误以为可以中断,导致中断嵌套
代码整理
修改makefile文件
# 编译boot.asm
build/%.bin: src/%.asm
nasm $< -o $@
# 写入到虚拟硬盘
build/master.img: build/boot.bin
dd if=build/boot.bin of=build/master.img bs=512 count=1 conv=notrunc
#删除生成的文件,和img.lock文件,不清楚这个文件为什么会出现,但是一出现这个,bochs就会报错,所以要删掉
.PHONY: clean # 伪目标,不生成文件,只是执行命令,不管有没有clean文件,都执行命令
clean:
rm -rf build/bx_enh_dbg.ini
rm -f build/*.bin build/*.img.lock
# 运行bochs
.PHONY: bochs
bochs: build/master.img
cd build && bochs -q修改run.sh文件
#!/bin/bash
set -e
make build/boot.bin || { echo "make boot.bin错误!"; exit 1; }
make build/master.img || { echo "make master.img错误!"; exit 1; }
make bochs || { echo "make bochs错误"; exit 1; }PC启动
flowchart TD
CPU加电自检 -->进入BIOS --> 主引导扇区0x7c00 --> 读取loader --> 进入Loader --> 检测内存 --> 准备保护模式 --> 进入保护模式 --> 内存映射 --> 加载内核硬盘读写
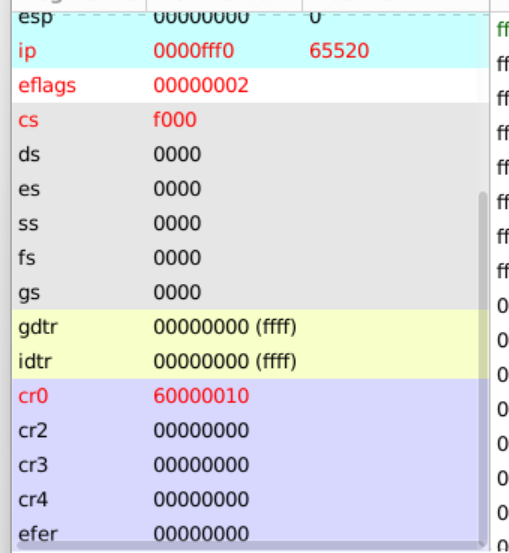
pc的状态
flowchart LR;
加电-->BOIS执行-->主引导扇区(读到0x7c00)-->跳转到0x7c00执行
主引导扇区只有512个字节,而且并不是所有的都可以用,这里512个字节还包括了硬盘的分区
如果程序大于512就无法使用,就必须从内存中读取在继续执行
| Primary 通道 | Secondary 通道 | in 操作 | out 操作 |
|---|---|---|---|
| Command Block Registers | |||
| 0x1F0 | 0x170 | Data | Data |
| 0x1F1 | 0x171 | Error | Features |
| 0x1F2 | 0x172 | Sector count | Sector count |
| 0x1F3 | 0x173 | LBA low | LBA low |
| 0x1F4 | 0x174 | LBA mid | LBA mid |
| 0x1F5 | 0x175 | LBA high | LBA high |
| 0x1F6 | 0x176 | Device | Device |
| 0x1F7 | 0x177 | Status | Command |
0x1F0 / 16bit 读写数据
0x1F1
0x1F2 / 扇区数量
0x1F3 - 0x1F5 / 起始扇区的前 24 位 0 ~ 23 位
0x1F6
- 0 - 3 / LBA 24 ~ 27 位
- 4:0 主盘,1 从盘
- 6:0 CHS 模式 , 1 LBA
- 5 7 : 固定为 1
0x1F7: out
- 0xEC:识别硬盘
- 0x20:读硬盘
- 0x30:写硬盘
in
- 0 ERR
- 3 DRQ 数据准备完毕
- 7 BUSY 硬盘繁忙
org 0x7c00 ; 0x7c00是BIOS将要加载的地址
mov ax,3 ; 设置显存模式
int 0x10 ; 调用BIOS中断
mov ax,0 ; 设置段寄存器
mov ds,ax ; 设置ds寄存器
mov ss,ax ; 设置ss寄存器
mov sp,0x7c00 ; 设置栈指针
mov dx,0x1f2 ; 设置硬盘扇区数
mov al,1 ; 设置读取扇区数
out dx,al ; 写入端口,读取一个扇区
mov al,0 ; 设置读取扇区的低8位
inc dx; 0x1f3 ;0x1f3是读取扇区的低8位
out dx,al ; 写入端口
inc dx; 0x1f4 ;0x1f4是读取扇区的中8位
out dx,al ; 写入端口
inc dx; 0x1f5 ;0x1f5是读取扇区的高8位
out dx,al ; 写入端口
inc dx; ; 将dx指向0x1f6
mov al,0b1110_0000 ; LBA模式
out dx,al ; 写入端口
inc dx;0x1f7
mov al,0x20 ;读硬盘
out dx,al ; 写入端口
.check_read_state: ;然后开始读取状态
nop
nop
nop ;加延迟 ATA的要求
in al,dx ;读取端口 dx --> 1f7
and al,0b1000_1000 ; 读取状态,判断是否读取完成
cmp al,0b0000_1000 ; 硬盘是否读取完成,如果没有完成,则继续读取
jnz .check_read_state ;
mov ax,0x100 ;要读取的内存地址
mov es,ax ;设置段寄存器
mov di,0
mov dx,0x1f0 ;1f0是读写的端口
read_loop: ;循环读取
nop
nop
nop
in ax,dx ;读取端口 dx --> 1f0
mov [es:di],ax ;将读取的数据写入内存
add di,2 ;di指针加2
cmp di,512 ;判断是否读取完成
jnz read_loop ;如果没有读取完成,则继续读取
;---------------------------------------
mov dx,0x1f2
mov al,1
out dx,al
mov al,2 ;需要写入的扇区
inc dx; 0x1f3
out dx,al
mov al,0
inc dx; 0x1f4
out dx,al
inc dx; 0x1f5
out dx,al
inc dx;
mov al,0b1110_0000 ; LBA模式
out dx,al
inc dx;0x1f7
mov al,0x30 ;写硬盘
out dx,al
mov ax,0x100
mov es,ax
mov di,0
mov dx,0x1f0
write_loop:
nop
nop
nop
mov ax,[es:di];读取内存数据
out dx,ax ;写入端口
add di,2 ;di指针加2
cmp di,512 ;判断是否写入完成
jnz write_loop
mov dx,0x1f7
.check_write_state:
nop
nop
nop ;加延迟 ATA的要求
in al,dx
and al,0b1000_0000 ;
cmp al,0b1000_0000 ;检查硬盘是否繁忙
jz .check_write_state
jmp $
times 510 -($-$$) db 0
db 0x55,0xaa
内核加载器
PC 在进入主引导扇区后,会读取loader,加载操作系统。在主引导扇区只有446个可用字节,64个字节是硬盘分区表,不能直接在主引导扇区加载操作系统,boot(MBR)的主要作用就是加载loader
编写读取硬盘的函数
org 0x7c00
mov ax,3
int 0x10
mov ax,0;
mov ds,ax
mov ss,ax
mov sp,0x7c00
mov edi,0x1000
mov ecx,0
mov bl,1
call read_disk
jmp $
read_disk:
pushad ;将a,b,c,d,si,di,sp,bp压栈
;读取硬盘
; edi --> 存储内存位置
; edi是di的扩展,就是32位的di
; ecx --> 读取的扇区位置
; bl --> 读取扇区的数量
mov dx,0x1f2
mov al,bl
out dx,al ; 扇区数量
mov al,cl ;扇区位置低8位
inc dx; 0x1f3
out dx,al ;扇区位置低8位
shr ecx,8 ;ecx右移8位。扇区中间8位位置就到了低8位
inc dx; 0x1f4
out dx,al ;中间8位
shr ecx,8 ;ecx右移8位。高8位就到了低8位
inc dx; 0x1f5
out dx,al
shr ecx,8
and cl,0b0000_1111 ;只取低4位
inc dx; 0x1f6
mov al,0b1110_0000 ;
or al,cl
out dx,al
inc dx;0x1f7
mov al,0x20 ;读硬盘
out dx,al
.check_read_state:
nop
nop
nop ;加延迟 ATA的要求
in al,dx
and al,0b1000_1000
cmp al,0b0000_1000
jnz .check_read_state
xor eax,eax
mov al,bl
mov dx,256
mul dx; ax = bl * 256
mov dx,0x1f0
mov cx,ax
.read_loop:
nop
nop
nop
in ax,dx
mov [edi],ax
add di,2
loop .read_loop
popad
ret
jmp $
times 510 -($-$$) db 0
db 0x55,0xaa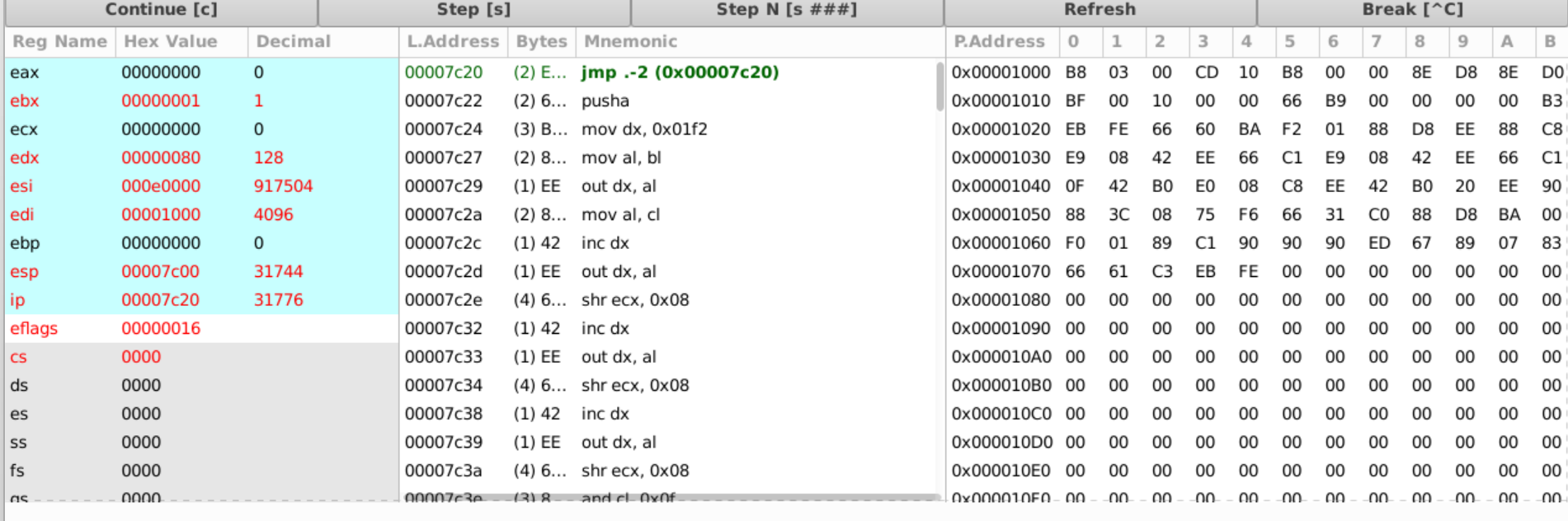
写一个loader
[org 0x1000]
mov ax,0XB800
mov es,ax
mov byte [es:0],"L"
jmp $修改boot
org 0x7c00
mov ax,3
int 0x10
mov ax,0;
mov ds,ax
mov ss,ax
mov sp,0x7c00
mov edi,0x1000
mov ecx,2
mov bl,4
call read_disk
jmp 0:0x1000 ;跳转到0x1000处执行
read_disk:
pushad ;将a,b,c,d,si,di,sp,bp压栈
;读取硬盘
; edi --> 存储内存位置
; edi是di的扩展,就是32位的di
; ecx --> 读取的扇区位置
; bl --> 读取扇区的数量
mov dx,0x1f2
mov al,bl
out dx,al ; 扇区数量
mov al,cl ;扇区位置低8位
inc dx; 0x1f3
out dx,al ;扇区位置低8位
shr ecx,8 ;ecx右移8位。扇区中间8位位置就到了低8位
inc dx; 0x1f4
mov al,cl
out dx,al ;中间8位
shr ecx,8 ;ecx右移8位。高8位就到了低8位
inc dx; 0x1f5
mov al,cl
out dx,al
shr ecx,8
and cl,0b0000_1111 ;只取低4位
inc dx; 0x1f6
mov al,0b1110_0000 ;
or al,cl
out dx,al
inc dx;0x1f7
mov al,0x20 ;读硬盘
out dx,al
.check_read_state:
nop
nop
nop ;加延迟 ATA的要求
in al,dx
and al,0b1000_1000
cmp al,0b0000_1000
jnz .check_read_state
xor eax,eax
mov al,bl
mov dx,256
mul dx; ax = bl * 256
mov dx,0x1f0
mov cx,ax
.read_loop:
nop
nop
nop
in ax,dx
mov [edi],ax
add di,2
loop .read_loop
popad
ret
jmp $
times 510 -($-$$) db 0
db 0x55,0xaa此时需要写入硬盘的文件发生变化,修改Makeflie文件
# 编译boot.asm
build/%.bin: src/%.asm
nasm $< -o $@
# 写入到虚拟硬盘
build/master.img: build/boot.bin build/loader.bin
dd if=build/boot.bin of=build/master.img bs=512 count=1 conv=notrunc
dd if=build/loader.bin of=build/master.img bs=512 count=4 seek=2 conv=notrunc # seek=2表示从第二个扇区开始写入
#删除生成的文件,和img.lock文件,不清楚这个文件为什么会出现,但是一出现这个,bochs就会报错,所以要删掉
.PHONY: clean # 伪目标,不生成文件,只是执行命令,不管有没有clean文件,都执行命令
clean:
rm -rf build/bx_enh_dbg.ini
rm -f build/*.bin build/*.img.lock
# 运行bochs
.PHONY: bochs
bochs: build/master.img
cd build && bochs -q运行程序,0x1000写入了loader程序
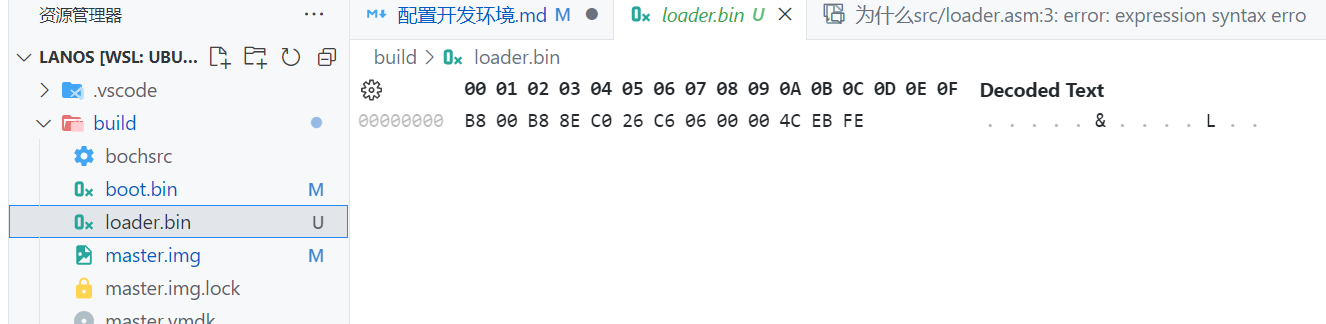
此时bochs成功显示字符”L”
32位架构
- 实模式 – 8086
- 保护模式 – 386
保护模式对内存进行了保护,80286的时候就有了16位了保护模式,1985年的时候80386开始就有了32位的保护模式,1989年inter发布80486引入了内存分页的机制
32位架构的寄存器
8086的寄存器是a/b/c/dx sp/bp/si/di
32位的寄存器是ea/eb/ec/ed …
- IP –> EIP
- flags –> eflags
- cs/ds/ss/es
- 多出来 fs/gs等
寻址方式
8086的寻址方式: 偏移地址+bx/bp + si/di
80386的寻址方式:ERX + ERX * (1/2/4/8) + 偏移地址
写一个32位的程序
[bits 32]
section .text
global main
main:
mov eax, 4 ; sys_write
mov ebx, 1 ; stdout
mov ecx, msg ; msg
mov edx, msglen ; msglen
int 80h ; syscall
mov eax, 1 ; sys_exit
mov ebx, 0 ; exit code
int 80h
section .data
msg db "Hello, World!", 10,13,0
msglen equ $-msg这是一个heLlo world的汇编
运行:
nasm -f elf32 hello.asmgcc -m32 hello.o -o hello
这运行第二条命令可能会报错,报错如下:
/usr/bin/ld: cannot find Scrt1.o: No such file or directory
/usr/bin/ld: cannot find crti.o: No such file or directory
/usr/bin/ld: skipping incompatible /usr/lib/gcc/x86_64-linux-gnu/9/libgcc.a when searching for -lgcc
/usr/bin/ld: cannot find -lgcc
/usr/bin/ld: skipping incompatible /usr/lib/x86_64-linux-gnu/libgcc_s.so.1 when searching for libgcc_s.so.1
/usr/bin/ld: cannot find libgcc_s.so.1
/usr/bin/ld: skipping incompatible /usr/lib/gcc/x86_64-linux-gnu/9/libgcc.a when searching for -lgcc
/usr/bin/ld: cannot find -lgcc
collect2: error: ld returned 1 exit status报错提示没有找到Scrt1.0,但是我这里是已经安装了的,因此是由于我的电脑没有安装32位的运行环境执行sudo apt-get install gcc-multilib安装32位运行环境即可
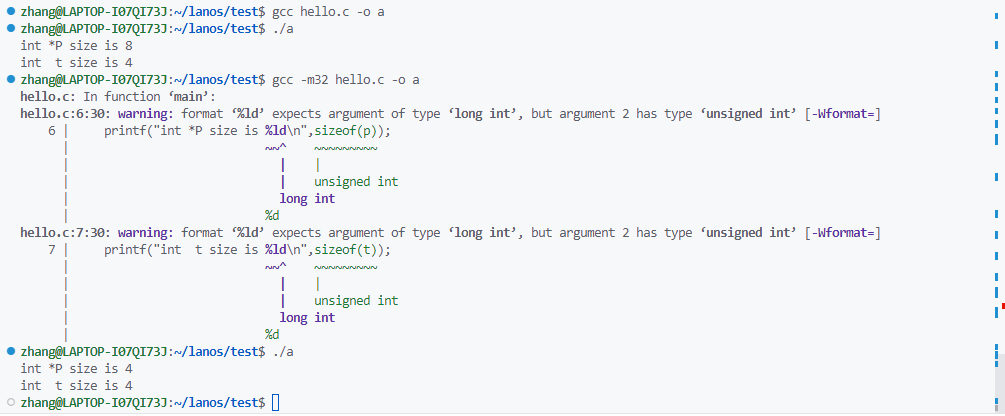
32位与64位兼容的问题
在csapp中看到一段话:使用int类型保存指针在32位是被允许的但是在64位机器就会报错,一开始没理解什么意思,了解到在32位机中指针的空间大小是4字节而64位是8位
#include <stdio.h>
int main() {
int *p;
int t;
printf("int *P size is %ld\n",sizeof(p));
printf("int t size is %ld\n",sizeof(t));
return 0;
}
内存检测
如果需要读取多个硬盘,就要检测当前数据有没有准备好,之前的代码一次检测准备好只能读一个扇区,也就是读第二个扇区就要重新等待,导致数据不对。
BIOS 0x15 0xe820
Address Range Descriptor Structure ARDS
| 字节偏移量 | 属性名称 | 描述 |
|---|---|---|
| 0 | BaseAddrLow | 基地址的低 32 位 |
| 4 | BaseAddrHigh | 基地址的高 32 位 |
| 8 | LengthLow | 内存长度的低 32 位,以字节为单位 |
| 12 | LengthHigh | 内存长度的高 32 位,以字节为单位 |
| 16 | Type | 本段内存的类型 |
Type 字段
| Type 值 | 名称 | 描述 |
|---|---|---|
| 1 | AddressRangeMemory | 这段内存可以被操作系统使用 |
| 2 | AddressRangeReserved | 内存使用中或者被系统保留,操作系统不可以用此内存 |
| 其他 | 未定义 | 未定义,将来会用到.目前保留. 但是需要操作系统一样将其视为ARR(AddressRangeReserved) |
调用前输入
| 寄存器或状态位 | 参数用途 |
|---|---|
| EAX | 子功能号: EAX 寄存器用来指定子功能号,此处输入为 0xE820 |
| EBX | 内存信息需要按类型分多次返回,由于每次执行一次中断都只返回一种类型内存的ARDS 结构,所以要记录下一个待返回的内存ARDS,在下一次中断调用时通过此值告诉 BIOS 该返回哪个 ARDS,这就是后续值的作用。第一次调用时一定要置为0,EBX 具体值我们不用关注,字取决于具体 BIOS 的实现,每次中断返回后,BIOS 会更新此值 |
| ES: DI | ARDS 缓冲区:BIOS 将获取到的内存信息写入此寄存器指向的内存,每次都以 ARDS 格式返回 |
| ECX | ARDS 结构的字节大小:用来指示 BIOS 写入的字节数。调用者和 BIOS 都同时支持的大小是 20 字节,将来也许会扩展此结构 |
| EDX | 固定为签名标记 0x534d4150,此十六进制数字是字符串 SMAP 的ASCII 码: BIOS 将调用者正在请求的内存信息写入 ES: DI 寄存器所指向的ARDS 缓冲区后,再用此签名校验其中的信息 |
返回值
| 寄存器或状态位 | 参数用途 |
|---|---|
| CF 位 | 若CF 位为 0 表示调用未出错,CF 为1,表示调用出错 |
| EAX | 字符串 SMAP 的 ASCII 码 0x534d4150 |
| ES:DI | ARDS 缓冲区地址,同输入值是一样的,返回时此结构中己经被BIOS 填充了内存信息 |
| ECX | BIOS 写入到 ES:DI 所指向的 ARDS 结构中的字节数,BIOS 最小写入 20 字节 |
| EBX | 后续值:下一个 ARDS 的位置。每次中断返回后,BIOS 会更新此值, BIOS 通过此值可以找到下一个待返回的 ARDS 结构,咱们不需要改变 EBX 的值,下一次中断调用时还会用到它。在 CF 位为 0 的情况下,若返回后的 EBX 值为 0,表示这是最后一个 ARDS 结构 |
修改代码
org 0x7c00
mov ax,3
int 0x10
mov ax,0;
mov ds,ax
mov es,ax
mov ss,ax
mov sp,0x7c00
mov edi,0x1000
mov ecx,2
mov bl,4
call read_disk
jmp 0:0x1000 ;跳转到0x1000处执行
read_disk:
pushad ;将a,b,c,d,si,di,sp,bp压栈
;读取硬盘
; edi --> 存储内存位置
; edi是di的扩展,就是32位的di
; ecx --> 读取的扇区位置
; bl --> 读取扇区的数量
mov dx,0x1f2
mov al,bl
out dx,al ; 扇区数量
mov al,cl ;扇区位置低8位
inc dx; 0x1f3
out dx,al ;扇区位置低8位
shr ecx,8 ;ecx右移8位。扇区中间8位位置就到了低8位
inc dx; 0x1f4
mov al,cl
out dx,al ;中间8位
shr ecx,8 ;ecx右移8位。高8位就到了低8位
inc dx; 0x1f5
mov al,cl
out dx,al
shr ecx,8
and cl,0b0000_1111 ;只取低4位
inc dx; 0x1f6
mov al,0b1110_0000 ;
or al,cl
out dx,al
inc dx;0x1f7
mov al,0x20 ;读硬盘
out dx,al
xor ecx,ecx ;清零
mov cl,bl
.read:
push cx
call .waits
call .reads
pop cx
loop .read
popad
ret
.waits:
mov dx,0x1f7
.check_read_state:
nop
nop
nop ;加延迟 ATA的要求
in al,dx
and al,0b1000_1000
cmp al,0b0000_1000
jnz .check_read_state
ret
.reads:
mov dx,0x1f0
mov cx,256 ;一个扇区256个字
.read_loop:
nop
nop
nop
in ax,dx
mov [edi],ax
add di,2
loop .read_loop
ret
jmp $
times 510 -($-$$) db 0
db 0x55,0xaaloader.asm
[org 0x1000]
check_memory:
mov ax,0
mov es,ax
xor ebx,ebx
mov edx,0x534D4150
mov edi,ards_buffer
.next:
mov eax,0xe820
mov ecx,20
int 0x15
jc .error
add di,cx
inc word [ards_count]
cmp ebx,0
jnz .next
mov cx,[ards_count]
mov si,0
.show: ;显示内存信息
mov eax,[ards_buffer+si]
mov ebx,[ards_buffer+si+8]
mov edx,[ards_buffer+si+16]
add si,20
loop .show
.error:
jmp $
ards_count:
dw 0
ards_buffer: 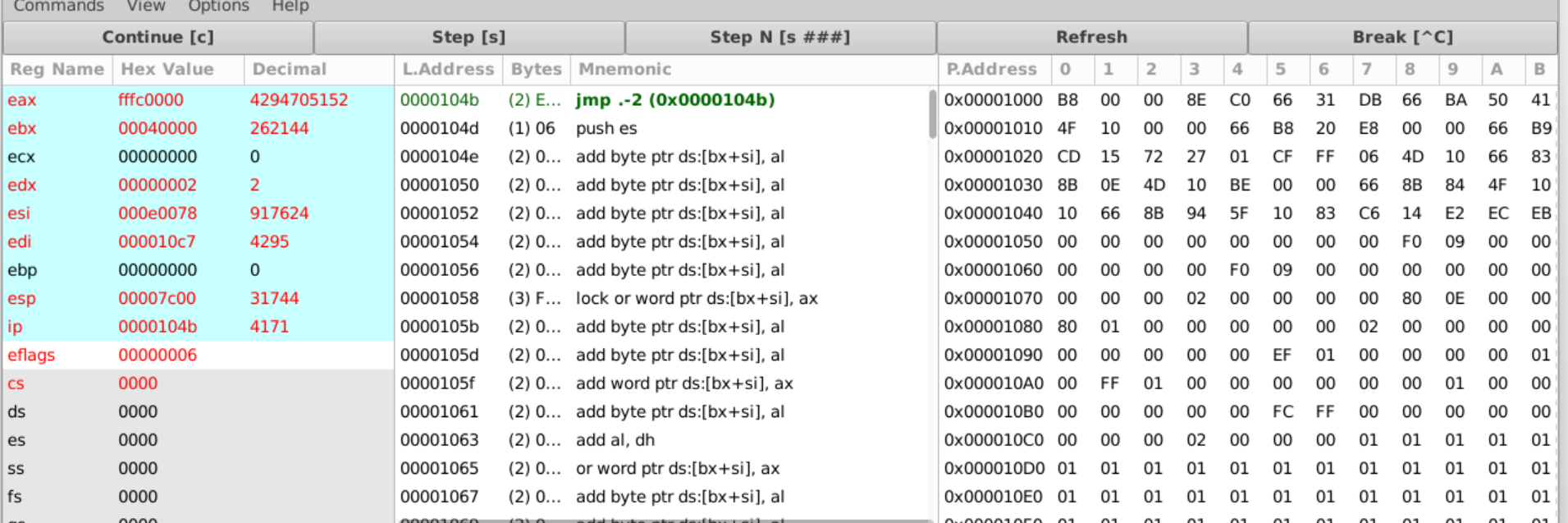
保护模式和全局描述符
… 待
内存映射
… 待
C语言篇
EFL文件
Executable and Linking Format / 可执行和链接的格式
- 可执行程序 python / bash / gcc –> PE (.exe)
- 可重定位文件 / 静态库 / gcc -c .o –> .o.a / .lib
- 共享的目标文件 / 动态链接库 –> .so(linux)/.dll(windows)
文件格式:
- 代码 .text
- 数据
- .data 已经初始话的数据
- .bss 没有初始化的数据 -buffer 缓存区域
使用readelf -e ./hello.o命令来查看elf文件
ELF Header:
Magic: 7f 45 4c 46 01 01 01 00 00 00 00 00 00 00 00 00
Class: ELF32
Data: 2's complement, little endian
Version: 1 (current)
OS/ABI: UNIX - System V
ABI Version: 0
Type: REL (Relocatable file)
Machine: Intel 80386
Version: 0x1
Entry point address: 0x0
Start of program headers: 0 (bytes into file)
Start of section headers: 64 (bytes into file)
Flags: 0x0
Size of this header: 52 (bytes)
Size of program headers: 0 (bytes)
Number of program headers: 0
Size of section headers: 40 (bytes)
Number of section headers: 7
Section header string table index: 3
Section Headers:
[Nr] Name Type Addr Off Size ES Flg Lk Inf Al
[ 0] NULL 00000000 000000 000000 00 0 0 0
[ 1] .text PROGBITS 00000000 000160 000022 00 AX 0 0 16
[ 2] .data PROGBITS 00000000 000190 000010 00 WA 0 0 4
[ 3] .shstrtab STRTAB 00000000 0001a0 000031 00 0 0 1
[ 4] .symtab SYMTAB 00000000 0001e0 000070 10 5 6 4
[ 5] .strtab STRTAB 00000000 000250 000020 00 0 0 1
[ 6] .rel.text REL 00000000 000270 000008 08 4 1 4
Key to Flags:
W (write), A (alloc), X (execute), M (merge), S (strings), I (info),
L (link order), O (extra OS processing required), G (group), T (TLS),
C (compressed), x (unknown), o (OS specific), E (exclude),
p (processor specific)
There are no program headers in this file.EFL Headers
- Magic 标识文件格式 7f 45 4c 46对应ASCLL中的.EFl
- class – ELF32 表明是32位的ELF文件
- Data 指明文件的编码格式,Inter机一般都是小段存储的
- Version 版本
- OS/ABI 指定文件的操作系统和应用程序的二进制接口
- Machine 知名兼容机 – 80386
Section Headers
- 0 段是一个空段,它没有任何数据,也没有任何属性。它的存在是为了使段头表的索引从1开始,方便后续的引用。
- 1 .text 段是一个程序段,它包含了文件中的代码部分。它的类型是 PROGBITS,表示它包含了程序定义的数据。它的属性是 AX,表示它可以分配内存(A)并且可以执行(X)。它的偏移量是 0x160,表示它在文件中的位置是从第 0x160 字节开始。它的大小是 0x22,表示它占用了 34 个字节。它的对齐方式是 16,表示它在内存中的地址必须是 16 的倍数。
- 2 .data 段是一个数据段,它包含了文件中的初始化数据部分。它的类型是 PROGBITS,表示它包含了程序定义的数据。它的属性是 WA,表示它可以分配内存(A)并且可以写入(W)。它的偏移量是 0x190,表示它在文件中的位置是从第 0x190 字节开始。它的大小是 0x10,表示它占用了 16 个字节。它的对齐方式是 4,表示它在内存中的地址必须是 4 的倍数。
- 3 .shstrtab 段是一个字符串表段,它包含了文件中的段名字符串。它的类型是 STRTAB,表示它是一个字符串表。它没有任何属性,表示它不需要在内存中分配或执行。它的偏移量是 0x1a0,表示它在文件中的位置是从第 0x1a0 字节开始。它的大小是 0x31,表示它占用了 49 个字节。它的对齐方式是 1,表示它在内存中的地址可以是任意值。它是段头表中的一个特殊段,它的索引是 3,表示它是段头表中的第 4 个段。它的作用是为其他段提供名称,通过段头结构中的 name 字段,可以从这个段中查找到对应的段名字符串。
- 4 .symtab 段是一个符号表段,它包含了文件中的符号信息。它的类型是 SYMTAB,表示它是一个符号表。它没有任何属性,表示它不需要在内存中分配或执行。它的偏移量是 0x1e0,表示它在文件中的位置是从第 0x1e0 字节开始。它的大小是 0x70,表示它占用了 112 个字节。它的对齐方式是 4,表示它在内存中的地址必须是 4 的倍数。它的每个元素的大小是 0x10,表示每个符号占用了 16 个字节。它的链接字段是 5,表示它与第 6 个段(.strtab)相关联。它的信息字段是 6,表示它包含了 6 个符号。它的作用是为文件中的代码和数据提供符号名,通过符号结构中的 name 字段,可以从相关联的字符串表段中查找到对应的符号名字符串。
- 5 .strtab 段是一个字符串表段,它包含了文件中的符号名字符串。它的类型是 STRTAB,表示它是一个字符串表。它没有任何属性,表示它不需要在内存中分配或执行。它的偏移量是 0x250,表示它在文件中的位置是从第 0x250 字节开始。它的大小是 0x20,表示它占用了 32 个字节。它的对齐方式是 1,表示它在内存中的地址可以是任意值。它是符号表段的一个特殊段,它与第 5 个段(.symtab)相关联。它的作用是为符号表段提供符号名,通过符号结构中的 name 字段,可以从这个段中查找到对应的符号名字符串。
- 6 .rel.text 段是一个重定位段,它包含了文件中的重定位信息。它的类型是 REL,表示它是一个重定位表。它没有任何属性,表示它不需要在内存中分配或执行。它的偏移量是 0x270,表示它在文件中的位置是从第 0x270 字节开始。它的大小是 0x8,表示它占用了 8 个字节。它的对齐方式是 4,表示它在内存中的地址必须是 4 的倍数。它的每个元素的大小是 0x8,表示每个重定位占用了 8 个字节。它的链接字段是 4,表示它与第 5 个段(.symtab)相关联。它的信息字段是 1,表示它包含了 1 个重定位。它的作用是为文件中的代码段提供重定位信息,通过重定位结构中的 offset 和 info 字段,可以指定需要重定位的地址和符号。
AT&T语法格式
区别
GCC生成的汇编语言有很多gas的伪指令
AT&T 默认数内存地址
立即数
立即数前面需要加上$
AT&T: $123 #
Inter: 123
寄存器
寄存器器前面加%
AT&T: movl $msg,%eax
Inter: mov dword eax,msg
movl == mov dword,这里不能省略
数据传送指令
数据传送方向是和Inter相反的
AT&T: movl %eax,%ebx
Inter: movx bx,ax
movx 是一个变量
| mov | 描述 | Intel |
|---|---|---|
| movl | 32位 | mov dword |
| movw | 16位 | mov word |
| movb | 8位 | mov byte |
数据类型
| 命令 | 数据类型 | nasm |
|---|---|---|
.ascii |
字符串 | db |
.asciz |
以 \0 结尾的字符串 |
db 0 |
.byte |
字节 | db |
.double |
双精度浮点 | dq |
.float |
单精度浮点 | dd |
.int |
32位整数 | dd |
.long |
32位整数和(.int 相同) |
dd |
.octa |
16字节整数 | |
.quad |
8字节整数 | dq |
.short |
16位整数 | dw |
.single |
单精度浮点 | dd |
| 这个只针对汇编器的,伪指令(CPU不会执行,汇编器认识的东西) |
伪指令
节定义 .section 段 segment
代码段 .text 数据段 .data
bss段 .bss – (BSS block started symbol,保留字段)
| 命令 | 描述 |
|---|---|
.comm |
通用缓存区域 |
.lcomm |
本地缓存区域 (只本文件可用的区域) |
寻址方式
[offset_address + index * size + base_address] ; 32 位的寻址方式
base_address(offset_address, index, size)
offset_address, index 必须是寄存器,size 1, 2, 4, 8
movl %edx, 4(%edi, %eax, 8) # att 语法
mov dword [edi + eax * 8 + 4] ; Intel 语法实现hello
.section .text
.globl main
main:
movl $4,%eax
movl $1,%ebx
movl $msg,%ecx
movl $(msg_end-msg),%edx
int $0x80
movl $1,%eax
movl $0,%ebx
int $0x80
.section .data
msg:
.asciz "hello world!\n"
msg_end: #注释是#号并且前面有空格
运行编译代码:
as -32 att.s -o att
gcc -m32 att.s -static两个细节一个注释,还有一个就是代码结束最后要添加一行空格,不然会报错



